Main Contribution
Main Contribution
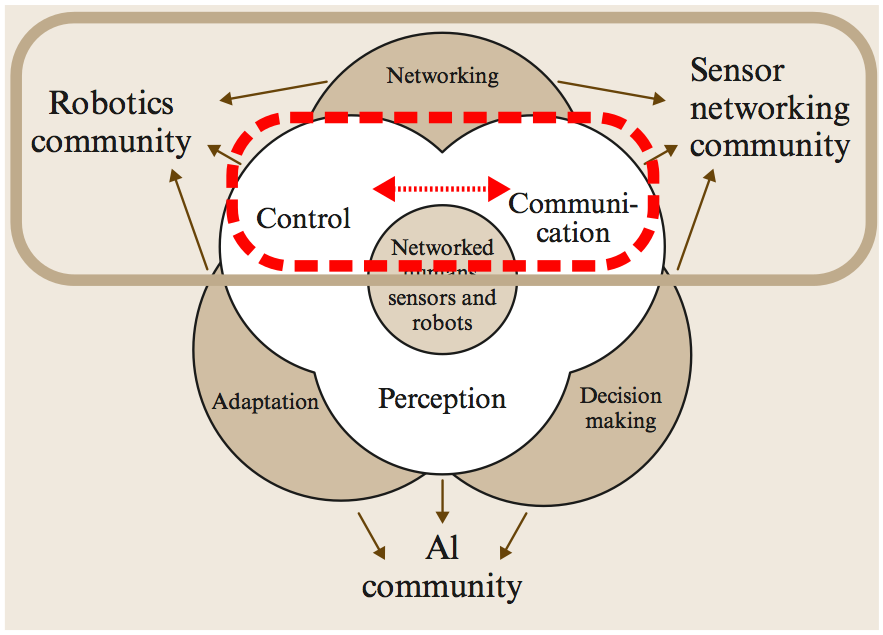
Network Control of Cyber-Physical Systems
Network Control of Cyber-Physical Systems
Wireless Sensors and Robot Networks
Mobility Control and Consensus Control
Contributions 2016 - 2018
Contributions 2016 - 2018
- Controlled Mobility to optimize network performances
- Path Planning in Wireless Sensor Networks
- Sport-Event-Filming (SEF)
- Environmental Monitoring
- Distributed Networked Control (Computer Networks + Control)
- Control of Consensus
- Cosimulation/Emulation
- Theoretical work
- Software Implementation
Mobility Control
Mobility Control
Controlled Mobility to Optimize Network Performances
Context
Context
Mobility control of one or more robots
- Both Centralized and Distributed
Applications
Applications
- Data Relaying
- Sport Events Filming (SEF)
- Path Planning (1/2)
- Network Epidemic Diffusion and Vulnerability Management
- Path Planning (2/2)
- Environmental Monitoring
Problem
Problem
How to move one or more networked robots for a given objective or purpose
Meta-heuristic for mobility control
- Minimization of Healing Times for networks
- Event Detection (Malware)
- Area Search with networked elements
- Improvement of QoS
Contributions
Contributions
Limited SOTA
Minimization of Healing Times for networks
Minimization of Healing Times for networks
- Minimization of Healing Times for networks
- In-network-information-based metaheuristic (Epidemic Density Tracking)
MeDrone: On the use of a medical drone to heal a sensor network infected by a malicious epidemic.
Ad Hoc Networks , 50, 115-127. Elsevier 2016.
Previous Work
Nicola Roberto Zema , Enrico Natalizio, Giuseppe Ruggeri, Michael Poss, Antonella Molinaro.
Healing wireless sensor networks from malicious epidemic diffusion.
2014 IEEE International Conference on Distributed Computing in Sensor Systems (DCOSS), 171-178, 2014 Marina Del Rey (United States). IEEE DCOSS 2014.
In-network-information-based metaheuristic (Epidemic Density Tracking)
In-network-information-based metaheuristic (Epidemic Density Tracking)

Area Search with networked elements
Area Search with networked elements
- Chemotaxis-based metaheuristic
- Bio-Inspired approach
- Bacteria Movement
Using UAV-based systems to monitor air pollution in areas with poor accessibility.
Accepted for publication by: Special Issue in: Unmanned Aircraft System and its Applications in Transportation, Journal of Advanced Transportation. Wiley 2017 .
Oscar Patricio Alvear, Carlos Tavares Calafate, Nicola Roberto Zema , Enrico Natalizio, Enrique Hernandez-Orallo, Juan-Carlos Cano, Pietro Manzoni.
PDUC-D: A discretized UAV guidance system for air pollution monitoring tasks.
Accepted for EAI GOODTECHS 2017
Oscar Patricio Alvear, Nicola Roberto Zema , Enrico Natalizio , Carlos Tavares Calafate.
A chemotactic pollution-homing UAV guidance system.
Accepted to IEEE Wireless Communications and Mobile Computing IWCMC 2017 : Adv. Indust. Nets & Intelligent Systems-AINIS Symposium . IEEE IWCMC AINIS 2017.
Chemotaxis-based metaheuristic


Improvement of QoS
Improvement of QoS
- Optimization Model for upper-bound benchmark
A biobjective formulation for filming sport events problem using drones.
The 9th IEEE International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications. IEEE IDAACS’2017.
Nicola Roberto Zema , Enrico Natalizio, Evsen Yanmaz.
An Unmanned Aerial Vehicle Network for Sport Event Filming with Communication Constraints.
First International Balkan Conference on Communications and Networking 2017. Tirana, Albania . BALKANCOM 2017.
Nicola Roberto Zema , Enrico Natalizio, Evsen Yanmaz.
Enregistrement d’événements sportifs par un réseau de drones avec des contraintes de communication.
Accepted to: 9ème Rencontres Francophones sur les Aspects Algorithmiques des Télécommunications. Quiberon (France). AlgoTel 2017.
Extra
Michal Krol, Enrico Natalizio, Nicola Roberto Zema .
Tag-based Data Exchange in Disaster Relief Scenarios.
Accepted at: IEEE 2017 International Conference on Computing, Networking and Communications (ICNC): Workshop WISARN , Silicon Valley (United States). IEEE ICNC 2017.
Optimization Model for upper-bound benchmark
DVRP and Virtual Forces


Future Works
Future Works
Improve QoS of Data Flows
Consensus-based algorithms
Consensus Control
Consensus Control
Distributed Networked Control Systems
Context
Context
Robot Coordination for Mobility and Formation control

Applications
Applications
- Exploration
- Search and Rescue
- Target Tracking
Data Relaying
- Simultaneous Localization and Mapping (SLAM)
Problem
Problem
Network Issues and Disruption heavily influences consensus reaching on current schemes
Find a control-based solution that can also be distributely implemented network-wise.
Contribution: Two-pronged
Contribution: Two-pronged
- A Theoretical control model that considers network disruption
- distriButed corrEctive conSenSus fanEt protocoL (BES²EL)
- A Practical network protocol that is able to properly use the model
- Second Order Corrective ConsEnsus algoRithm (SOC²ER)

Contributions
Contributions
A Packet Loss Tolerant Rendezvous Algorithm for Wireless Networked Robot Systems.
Accepted for publication by Asian Journal of Control . Wiley 2017 .
Sabato Manfredi, Claudio Pascariello, Nicola Roberto Zema , Isabelle Fantoni, Michał Król.
A cooperative packet loss-tolerant algorithm for wireless networked robots rendezvous.
Accepted at: IEEE 2017 International Conference on Computing, Networking and Communications (ICNC): Workshop (ICNC'17 WS) , Silicon Valley (United States). IEEE ICNC 2017.
Future works
Future works
- Closed-loop mobility control on consensus
- Attain a link between the mobility control and consensus control
- Mobility is subject AND object of control
- Use consensus for Time Synchronization
- Implement Distributed-TDMA on chains of robots
Merged Efforts: CUSCUS
Merged Efforts: CUSCUS
Context: No integrated network-control simulation suites
Context: No integrated network-control simulation suites

Problem: Integration of detailed control and networking aspects.
Problem: Integration of detailed control and networking aspects.

Contributions: Co-simulation of Networked Robotics
Contributions: Co-simulation of Networked Robotics
New simulation environment

Contributions
Contributions
The CUSCUS simulator for Distributed Networked Control Systems: Architecture and Use-cases.
Published in the Special Issue on Ad Hoc Networks: “Advances in Wireless Communication and Networking for Cooperating Autonomous Systems”. Wiley 2017 .
Nicola Roberto Zema , Angelo Trotta, Guillaume Sanahuja, Enrico Natalizio, Marco Di Felice, Luciano Bononi.
CUSCUS: CommUnicationS-Control distribUted Simulator.
Accepted at: 14th Annual IEEE Consumer Communications & Networking Conference DEMO SESSION , Las Vegas (United States). IEEE CCNC 2017.
Nicola Roberto Zema , Angelo Trotta, Guillaume Sanahuja, Enrico Natalizio, Marco Di Felice, Luciano Bononi.
CUSCUS: An integrated simulation architecture for Distributed Networked Control Systems.
Accepted at: 14th Annual IEEE Consumer Communications & Networking Conference , Las Vegas (United States). IEEE CCNC 2017.
Project: BASCulE
Project: BASCulE
Bio-inspired Approaches for wireleSs networked robot Control and CoopEration
Bio-inspired Approaches for wireleSs networked robot Control and CoopEration
QoS Control
QoS Control
- Navigation de robots, commande, collecte de données
- Large bande passante
- Environnement terrestre, aérien et sous-marin
- SLAM
- Exploration
- Rescue
- Recovery
Core Idea
Core Idea
Achieve Control of QoS
Closed Control loop over network primitives to have control over QoS.
Steps
Steps
- Preliminary Steps
- Controlled Mobility Through bio-inspired approaches
- Distributed Networked Control via Mobility
- QoS Control
First Step
First Step
…to follow a completely distributed path to achieve Distributed Networked Control, where the network nodes will gather the necessary data to run their distributed algorithms only from their environment and process it through autonomic techniques.
Second Step
Second Step
…by exploiting bio-inspired networking approach to Controlled Mobility and using Corrective Consensus to achieve the necessary data stability to run them, I envisage to achieve a set of scientific findings that bind together Networking and Control in a single framework…
Conclusion
Conclusion
Thank You Slide
Thank You Slide
- Add the following properties to one headline:
:SLIDE: thank-you-slide segue :ASIDE: right :ARTICLE: flexbox vleft auto-fadein
Both
thank-you-slideandsegueare necessary!
Thank You ˊ・ω・ˋ