Nicola Roberto Zema
Table of Contents
1 En bref

I was born in 1986 in Reggio Calabria, Italy. I currently am a post-doctoral researcher at IFSTTAR Lille under the SMARTIES project and I was a member of LabEX MS2T at the Heudiasyc Laboratory, UTC Université de Technologie de Compiègne, France.
I currently investigate the robotic applications of intertwined networking and control.
My research revolves around the combination of exact mathematical models and robust meta-heuristics, all seen from a primarily Telecommunications perspective.
In the last years i bridged my previous research on autonomic and bio-inspired networking with distributed networked control, in the framework of DIVINA Team.
1.1 Background
I graduated in Telecommunications Engineering (BSc 2009; MSc 2011) and received a PhD in Information Engineering (Feb 2012 - Jun 2015) at the University Mediterranea of Reggio Calabria, Italy.
The research on Sensors, Autonomic and Epidemic Networks, that I developed during my doctoral studies, coupled with my constant efforts to understand the fundamentals of everything I learn, has helped me gaining deeper insights into the investigated issues and, again, reinforced my interest in pursuing research in this field.
I already performed an extensive theoretical research on Autonomic, Cognitive and Bio- Inspired Networking culminating in the deployment of a network framework within the PRIN (National Relevance Research Project) project STEMNet: “STEM” devices for self-organizing wireless Networks (2009).
Recently, I have envisioned a particular geographically-driven information flow in a wireless sensor network environment that is capable to drive mobile nodes in the field thanks to the information diffused by the network nodes themselves. This idea led to the development of a practical and scalable implementation of a robot movement protocol in a GPS-denied environment that uses “r-maps” for relative positioning and navigation. In this settings, the choices of the nodes are driven by distributed algorithms and cognitive cycles present on them.
During my first year of post-doctoral fellowship, i focused to introduce control theory in my research activities and be able to develop interesting insight on the research crest between networking, control and robotics.
The varied experience gathered from my previous research has convinced me to develop a work culture to meticulously control small steps in an experiment in order to fully understand its dynamics. Moreover, it allowed me to develop a work ethic where theoretical models and experiments must proceed together with equal importance. I like applying the knowledge I gained to real problems, working in an intellectual and stimulating environment where I can keep learning and improving.
1.2 Coordinates
| Dr. Nicola Roberto Zema | |
|---|---|
| tél: | ??? |
| Address | ??? |
| Poste | ??? |
| Nicola Zema |
2 Research Topics
In my academic career, my research domain has always been Networking.
During my PhD i was more focused on pure Telecommunication aspects and, in detail, IEEE 802.11-related topics like:
- mesh networks
- autonomic networks
- bio-inspired newtorking
- controlled mobility
In detail, i worked first on the application of cognitive abilities on network nodes, like the capability to sense their neighbor's network parameters and then i switched to mobility-related issues in the same environment.
Publications on the subject: STEM-NET, COMVIVOR
Near the end of my PhD i already transitioned to a controlled-mobility centered research, developing GPS-less, network-centered tracking systems and active node searches using flying robots. Publications on the subject: GPS-WISE, GPS-LESS During the transition between my PhD and my postdoc i started to include elements of control engineering in my research. This tendency has then sprouted in an increased reliance of exact models and mathematical formulations, that, in turn bounded me more and more with topics of control theory. Publications on the subject: OnTrack, Ext.Track
2.0.1 DIVINA Challenge Team (2016 - mid 2017)
My research horizon broadened when i joined the DIVINA LABEX MS2T Challenge team, whose stated topic is: to efficiently explore a totally or partially unknown area using a multi-UAV system with vision sensors as the main perception modality and bio-inspired communications through distributed control.
For this project, my contributions are four-pronged:
- new simulation tools to merge the world of networking and control engineering for robotic applications (UAVs)
3 Communication-Control Distributed Simulator (CUSCUS)
(It is “distributed” for real)
3.1 TL;DR
By connecting two well-known-in-literature simulation suites (FL-AIR for CONTROL and NS-3 for NETWORKING), we are able to perform real-time accurate simulations of the wireless communication among fleets of UAVs, and analyze the impact of the radio propagation phenomena and packet level simulation on the fleet mobility algorithms.
3.2 Standard Introduction
The current merging of networking and control research fields within the scope of robotic applications is creating fascinating research and development opportunities.
However, the tools for a proper and easy management of experiments still lag behind.
Although different solutions have been proposed to simulate and emulate control systems and, more specifically, fleets of Unmanned Aerial Vehicles (UAV), still they do not include an efficient and detailed network-side simulation, which is usually available only on dedicated software.
On the other hand, current advancements in network simulations suites often do not present the possibility to include an accurate description of controlled systems.
In the middle 2010s, integrated solutions of networking and control for fleets of UAVs are still lacking….
UNTIL NOW
3.3 What is it?
We fill such gap in the literature by proposing a novel simulation framework for networked control system, called CommUnicationS-Control distribUted Simulator (CUSCUS). Differently from the state of the art, CUSCUS allows simulating both the UAV networking and flight control, via the integration of two existing tools: the Framework Libre AIR (FL-AIR) simulator and the mainstream network simulator NS-3 .
3.4 What does it do?
Using FL-AIR, a real-time and fine-grained simulation of the micro-mobility of each UAV can be achieved, including:
- the modeling of virtual sensors/actuators,
- the modeling of the aerial networking a packet-level
- the modeling of formation control algorithms
- the modeling of flight control algorithms
- the PID regulations and the drone stability.
3.4.1 Why the term "Distributed"?
Levaraging the FLAIR part, it is possible to create UAV applications and test them on a simulated control environment before the actual deployment, since the same code can also be plugged in real drones.
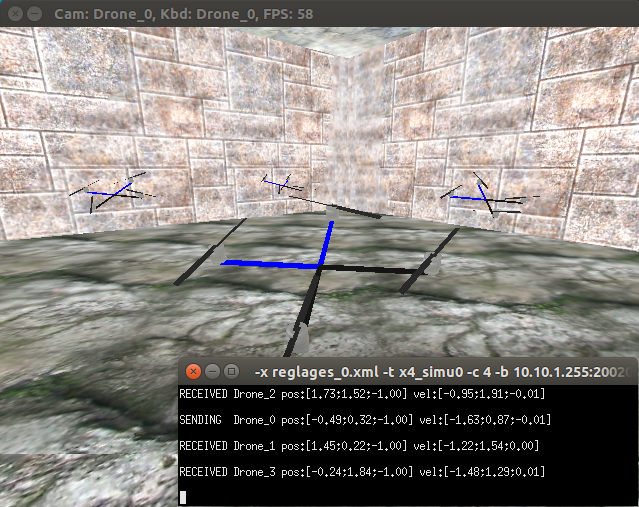
In CUSCUS (and FLAIR), each virtual drone application is responsible to simulate its flight model and control and then socket-out the data to a rendering/control room engine.
This means that it is always possible to connect a real drone to the engine and run it alongside its virtual fellows.

To make the simulation even more realistic and make a step towards the usage of fleets of UAVs in Smart city scenarios, we just finished implementating a Scenario Module in both FL-AIR and NS-3.
Through the Scenario Module, it is possible to model realistic 3D environments, importing the scenario maps directly from OpenStreetMaps and taking into account the location of buildings and the street topology.
3.5 How does it work?
We have some papers in review, so it is better to keep that for ourselves (for the moment, then it will be public domain, maybe…).
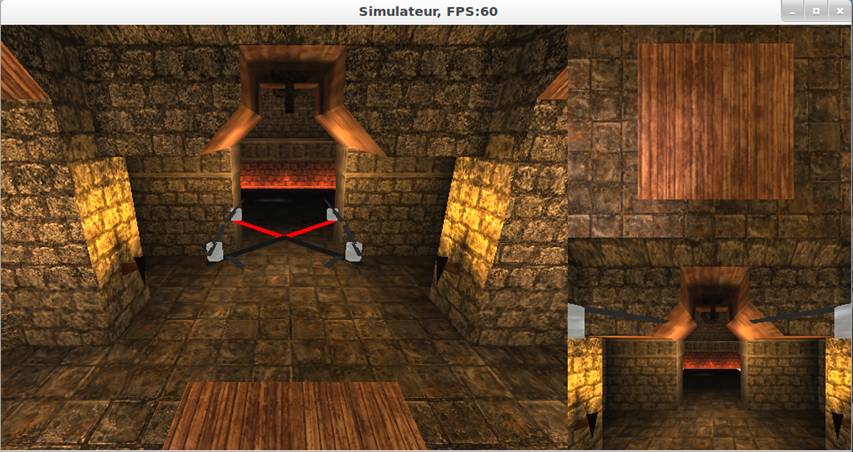
In the meantime, here's a neat video of it:
3.5.1 Highlights
- Leader-following scenario
- Formation Maintenance
- WITH SIMULATED BUILDINGS!!!
- TAKEN DIRECTLY FROM OPENSTREETMAPS
- WITH BUILDING COLLISION AVOIDANCE
- Done using the virtual sensors
- The leader has a set of pre-defined way-points
- The followers use a Particle Swarm Optimization-based (PSO) algorithm to keep formation
- The algorithm needs message exchange to work
- All the networking is simulated at packet level through NS3 in realtime
4 Teaching
4.1 Past Works
- Teaching assistant of “LO21 Programmation et conception orientées objet”
Spring 2016. A engineer's course at Université de Technologie de Compiègne, France, 48 hours. The course had the objective to provide the students with the initiation to the conception in object-oriented programming, with a study on different topics (Classes, Objects, Encapsulation, Generic Programming, UML, Design Patterns). The teaching assistant had the role to illustrate all the courses' topics in a practical way.
- Teaching assistant of “NF92: Traitement automatique de l'information”
Autumn 2016. A engineer's course at Université de Technologie de Compiègne, France, 18 hours. The course had the objective to provide the students with the basic concepts and tools to manipulate information and understand the potential of their automatic processing. The teaching assistant had the role to illustrate concepts of applied mathematics and the fundamentals of LaTeX and HTML.
- Teaching assistant of “LC14 - Communication scientifique et technique en anglais”
Autumn 2016. A course at Université de Technologie de Compiègne, France, 1 Seminar of 1 hour. LC 14 aims to increase the level of English language in students by: (i) inciting them to communicate upon the technical and scientific actualities and (ii) by teaching them how to vulgarize their knowledge in order to transmit it to people not-specialized on their own domain and within an English-speaking environment,
- Teaching assistant of “TIS07 - Algorithmes et protocoles pour l'interconnexion des système”
Autumn 2016 – A master's and doctoral course at Université de Technologie de Compiègne, France, 8 hrs. The objective of this UV is to present the algorithms, the protocols and the communication technologies employed in the definition of “Systems of Systems”. A minimal knowledge of networking is necessary to purposefully follow the UE, that presents advanced concepts in telecommunication networks that cover: advanced IP architectures, ad-hoc networks; robot and sensor networks.
- Teaching assistant of SY02 "Statistical methods for engineering
Printemps 2016. A engineer's course at Université de Technologie de Compiègne, France, 130 hours. The module introduces students to the basic concepts and methods of statistics for use in the engineering sciences. The notions of estimation, confidence interval, hypothesis tests, linear regression, analysis of variance are discussed in particular.

5 Publication List
Under Review
-
Nicola Roberto Zema, Enrico Natalizio,Luigi Di Puglia Pugliese, Francesca Guerriero .
Unmanned Aerial Vehicles for Wireless Sensor Networks data collection: a virtual potential functions based approach.
Submitted to: IEEE INFOCOM 2018
Journals Note: the author list of the items marked with an "*" is in alphabetical order
-
Nicola Roberto Zema, Angelo Trotta, Enrico Natalizio, Marco Di Felice, Luciano Bononi.
The CUSCUS simulator for Distributed Networked Control Systems: Architecture and Use-cases.
Published in the Special Issue on Ad Hoc Networks: “Advances in Wireless Communication and Networking for Cooperating Autonomous Systems”. Wiley 2017. -
Oscar Patricio Alvear,Nicola Roberto Zema
, Enrico Natalizio, Carlos Tavares Calafate.
Using UAV-based systems to monitor air pollution in areas with poor accessibility.
Accepted for publication by: Special Issue in: Unmanned Aircraft System and its Applications in Transportation, Journal of Advanced Transportation. 2017 .
[BibTeX] - * Sabato Manfredi, Enrico Natalizio, Claudio Pascariello,
Nicola Roberto Zema.
A Packet Loss Tolerant Rendezvous Algorithm for Wireless Networked Robot Systems.
Accepted for publication by Asian Journal of Control . Wiley 2017 .
[BibTeX] -
Nicola Roberto Zema, Enrico Natalizio, Giuseppe Ruggeri, Michael Poss, Antonella Molinaro.
MeDrone: On the use of a medical drone to heal a sensor network infected by a malicious epidemic.
Ad Hoc Networks, 50, 115-127. Elsevier 2016.
[BibTeX] - * Orazio Briante, Valeria Loscrì, Pasquale Pace, Giuseppe Ruggeri, Nicola Roberto Zema.
COMVIVOR: an evolutionary communication framework based on survivors' devices Reuse.
Wireless Personal Communications, 85, 4, 2021-2040. Springer 2015.
[BibTeX] - * Gianluca Aloi, Luca Bedogni, Marco Di Felice, Valeria Loscrì, Antonella Molinaro, Enrico Natalizio, Pasquale Pace, Giuseppe Ruggeri, Angelo Trotta, Nicola Roberto Zema.
STEM‐Net: an evolutionary network architecture for smart and sustainable cities.
, Transactions on Emerging Telecommunications Technologies, 25, 1, 21-40. Wiley 2014.
[BibTeX]
Conferences Note: the author list of the items marked with an "*" is in alphabetical order
-
Oscar Patricio Alvear, Carlos Tavares Calafate,Nicola Roberto Zema, Enrico Natalizio, Enrique Hernandez-Orallo, Juan-Carlos Cano, Pietro Manzoni.
PDUC-D: A discretized UAV guidance system for air pollution monitoring tasks.
Accepted for EAI GOODTECHS 2017 - * Luigi Di Puglia Pugliese, Francesca Guerriero, Enrico Natalizio, Nicola Roberto Zema.
A biobjective formulation for filming sport events problem using drones.
The 9th IEEE International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications. IEEE IDAACS’2017. -
Nicola Roberto Zema, Enrico Natalizio, Evsen Yanmaz.
An Unmanned Aerial Vehicle Network for Sport Event Filming with Communication Constraints.
First International Balkan Conference on Communications and Networking 2017. Tirana, Albania. BALKANCOM 2017.
[BibTeX] - Nicola Roberto Zema, Enrico Natalizio, Evsen Yanmaz.
Enregistrement d’événements sportifs par un réseau de drones avec des contraintes de communication.
Accepted to: 9ème Rencontres Francophones sur les Aspects Algorithmiques des Télécommunications. Quiberon (France). AlgoTel 2017.
[BibTeX] - Oscar Patricio Alvear, Nicola Roberto Zema, Enrico Natalizio , Carlos Tavares Calafate.
A chemotactic pollution-homing UAV guidance system.
Accepted to IEEE Wireless Communications and Mobile Computing IWCMC 2017 : Adv. Indust. Nets & Intelligent Systems-AINIS Symposium. IEEE IWCMC AINIS 2017.
[BibTeX] - Nicola Roberto Zema, Angelo Trotta, Guillaume Sanahuja, Enrico Natalizio, Marco Di Felice, Luciano Bononi.
CUSCUS: CommUnicationS-Control distribUted Simulator.
Accepted at: 14th Annual IEEE Consumer Communications & Networking Conference DEMO SESSION, Las Vegas (United States). IEEE CCNC 2017.
[BibTeX] - Michal Krol, Enrico Natalizio, Nicola Roberto Zema.
Tag-based Data Exchange in Disaster Relief Scenarios.
Accepted at: IEEE 2017 International Conference on Computing, Networking and Communications (ICNC): Workshop WISARN, Silicon Valley (United States). IEEE ICNC 2017.
[BibTeX] - Nicola Roberto Zema, Angelo Trotta, Guillaume Sanahuja, Enrico Natalizio, Marco Di Felice, Luciano Bononi.
CUSCUS: An integrated simulation architecture for Distributed Networked Control Systems.
Accepted at: 14th Annual IEEE Consumer Communications & Networking Conference , Las Vegas (United States). IEEE CCNC 2017.
[BibTeX] - Sabato Manfredi, Claudio Pascariello, Nicola Roberto Zema, Isabelle Fantoni.
A cooperative packet loss-tolerant algorithm for wireless networked robots rendezvous.
Accepted at: IEEE 2017 International Conference on Computing, Networking and Communications (ICNC): Workshop (ICNC'17 WS), Silicon Valley (United States). IEEE ICNC 2017.
[BibTeX] - Nicola Roberto Zema, Nathalie Mitton, Giuseppe Ruggeri.
A GPS-less on-demand mobile sink-assisted data collection in wireless sensor networks.
2014 IFIP Wireless Days (WD) Rio De Janeiro (Brazil). IFIP WD 2014.
[BibTeX] - Nicola Roberto Zema, Enrico Natalizio, Giuseppe Ruggeri, Michael Poss, Antonella Molinaro.
Healing wireless sensor networks from malicious epidemic diffusion.
2014 IEEE International Conference on Distributed Computing in Sensor Systems (DCOSS), 171-178, 2014 Marina Del Rey (United States). IEEE DCOSS 2014.
[BibTeX] -
Nicola Roberto Zema
, Nathalie Mitton, Giuseppe Ruggeri.
Using location services to autonomously drive flying mobile sinks in Wireless Sensor Networks.
International Conference on Ad Hoc Networks Rhodes (Greece). EAI Ad Hoc Networks 2014 .
[BibTeX]
6 Services
6.1 Editorship
- Guest Editor of the Digital Communications and Networks Journal's Special Issue on: “Theory and Applications of UAV Networks”
6.2 Organizing committee membership
- Publicity Chair of the International Workshop on Wireless Sensor, Actuator and Robot Networks (WiSARN) 2018
- Publicity Chair of the International Workshop on Wireless Sensor, Actuator and Robot Networks (WiSARN) 2017
6.3 Chairing
- Session Chair at the 14th IEEE Consumer Communications and Networking Conference (IEEE CCNC) 2017: Special Session: Ubiquitous UAVs on the Way: Communications & Networking Challenges
- Session Chair of the International Workshop on Wireless Sensor, Actuator and Robot Networks (WISARN - IEEE ICNC) 2017
6.4 Technical program committee membership
- IEEE Wireless Communications and Networking Conference 2018 (IEEE WCNCW TC-CPS 2018)
- The 11th International Workshop on Wireless Sensor, Actuator and Robot Networks (WISARN - IEEE 2018)
- The 15th IEEE Consumer Communications and Networking Conference (IEEE CCNC) 2018
- The 10th International Workshop on Wireless Sensor, Actuator and Robot Networks (WISARN - IEEE 2017)
- The 14th IEEE Consumer Communications and Networking Conference (IEEE CCNC) 2017
- The 13th IEEE Consumer Communications and Networking Conference (IEEE CCNC) 2016
- The 9th International Workshop on Wireless Sensor, Actuator and Robot Networks (WiSARN 2016)
- The CoWPER'16 workshop on the 13th annual IEEE International Conference on Sensing, Communication and Networking (SECON) 2016.
- The 2nd International Conference on Computing for Sustainable Global Development, INDIACOM 2015
- The 2015 IEEE 82nd Vehicular Technology Conference (VTC2015-Fall)
6.5 Journal Reviewer
- IEEE Transaction on Mobile Computing 2017;
- Elsevier Journal of Information Security and Applications 2017;
- Elsevier Ad Hoc Networks 2017, 2016, 2015
- Wiley Asian Journal of Control 2017, 2016, 2015
- Elsevier Digital Communications and Networks, 2015
- Elsevier Computer Communications, 2016